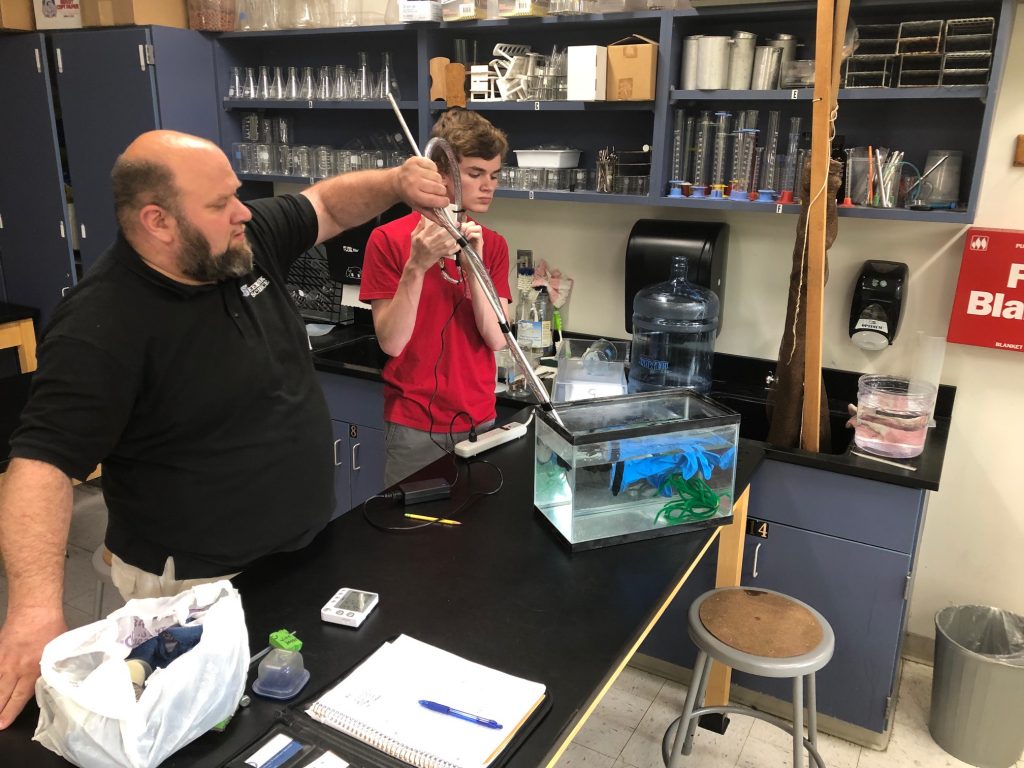
In 2019, we collaborated with a marine science student from Seekonk High School to conduct an experiment in waterproofing robotic hands. When working in environments where humans cannot safely venture with their own two hands, robotic proxies must be used. One of the critical bottlenecks in conducting more meaningful work is the ability to interact with that environment with our own two hands – touch touch is to interpret. Robotic manipulators do exist, however still lack the dexterity, touch, and ability to grasp with an opposable thumb. Future developments in the field will solve this key technology limitation in ocean exploration and bring the human element ever further to and within the sea.
For this project, we successfully waterproofed an off the shelf robotic hand and learned about the limitations of the technology when modified for underwater use. With additional funding support, similar work with students will allow us to develop a number of tools for exploration use.