
 A few folks close in my circles have been asking, even prodding, when I expect to be back in the field exploring and studying the deep. Well, as I’ve come to appreciate over the years, there isn’t much sense going back “just because”. Certainly, we could have been out there annually or more often for the last several years doing what has become more or less routine stuff – yes, science has made its way deeper in to the mesophotic zone, but it remains fraught with limitations. Traversing this underwater space at depth and through blocks of productive time remains challenging as the tools in the toolbox remain primitive at best.
A few folks close in my circles have been asking, even prodding, when I expect to be back in the field exploring and studying the deep. Well, as I’ve come to appreciate over the years, there isn’t much sense going back “just because”. Certainly, we could have been out there annually or more often for the last several years doing what has become more or less routine stuff – yes, science has made its way deeper in to the mesophotic zone, but it remains fraught with limitations. Traversing this underwater space at depth and through blocks of productive time remains challenging as the tools in the toolbox remain primitive at best.
The science community I was groomed from within are largely opportunists when it comes to underwater work. The tools of the trade, by necessity, are off the shelf and fairly inexpensive. Things like turkey basters, small syringes, butter knives, ziplock bags, duck tape, and zip ties make up the arsenal for field collecting benthic critters all over the world. On the other hand, the working dive community that I hang my hat in embraces tools for problem solving every single day – sometimes its as simple as a custom fabricated jig or bracket, and other times its a more complex custom imaging array, and everything in between. So, as I’ve probed the depths to satisfy my own curiosities, its always dawned on me that a little ingenuity could make more efficient use of the very, very limited time at depth we are afforded with mixed-gas diving.
And so this has been the quest for the last 5 years or so…refine the tools and technologies so the next excursion can be incredibly productive, and possibly open up a new realm for discovery potential. A ton has been happening back at the shop – lights, cameras, suction devices, rosettes of viles, new life support, and…
The DPV tool box. YES!
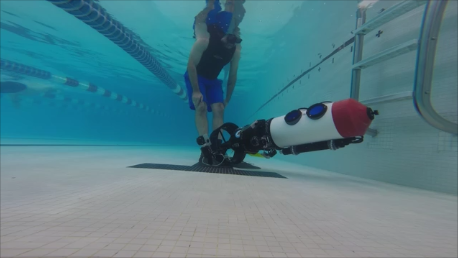
Back in 2003, I hand sketched a diver propulsion vehicle tricked out with strategically placed cameras and some other goodies. Never would I have imagined that it would have taken 14 years to get it together and in the water, but these things take time. The concept has been that here in the terrestrial world, we go to work and take a tool box. Underwater, we stuff a bunch of disorganized clutter in a mesh bag, open it, lose half of it, then shove it all back in when done…its’s a mess. At depths of 200, 300, and 400 feet, every second counts, and futzing with a bag doesn’t make much sense. So, a couple years ago, I took the first practical steps towards fabricating mission specific “payloads” that can be fit to my DPV (diver propulsion vehicle). The payloads can be organized and selected based on mission requirements, and in-water operational protocols. Payload 1 is a set of LED lights that can be directed downward or at a vertical wall, and a complementary camera that can record the traverse in a means that will allow for creating mosaic images in the future. I took it a step further and modified the lights with blue filters to stimulate fluorescence in the marine environment. Payloads 2 & 3? Will leave you guessing…

Today’s quick splash at UCONN Avery Point was nothing more than a ballast and trim exercise with the DPV toolbox, but it’s these small steps that help to justify the means along the way to the end – lots of sweat poured to-date, and while it could be another couple of years before a return to the deep, I have a validation checkpoint from which to build upon.
Up next – some systems integration, which is where things will start getting interesting.
The DPV Toolbox project has been made possible with support from:
- Nightsea
- Juice Robotics LLC
- UCONN Avery Point
- Innovate RI Grant Program